





















 |
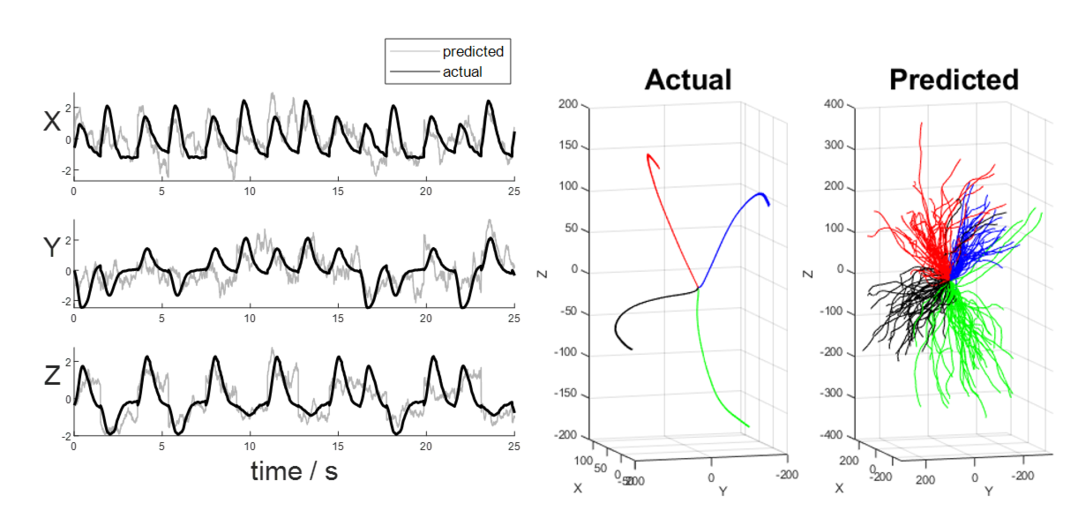
디코딩 모델을 활용한 상상 궤적 예측 결과. |
KAIST 뇌인지과학과 정재승 교수 연구팀은 뇌전증 환자를 대상으로 팔을 뻗는 동작을 상상할 때 관측되는 대뇌 피질 신호를 분석해 환자가 의도한 팔 움직임을 예측하는 팔 동작 방향 상상 뇌 신호 디코딩 기술을 개발했다.
이러한 기술은 실제 움직임이나 복잡한 운동 상상이 필요하지 않다. 때문에 운동장애를 겪는 환자가 장기간 훈련 없이도 자연스럽고 쉽게 로봇 팔을 제어할 수 있어 앞으로 다양한 의료기기에 폭넓게 적용이 기대된다.
뇌-기계 인터페이스는 인간이 생각만으로 기계를 제어할 수 있는 기술이다. 로봇 팔 제어를 위한 뇌-기계 인터페이스를 구현하기 위해서는 인간이 팔을 움직일 때 뇌에서 발생하는 전기신호를 측정하고 기계학습 등 다양한 인공지능 분석기법으로 뇌 신호를 해독해 의도한 움직임을 뇌 신호로부터 예측할 수 있는 디코딩 기술이 필요하다.
그러나 상지 절단 등으로 운동장애를 겪는 환자는 팔을 실제로 움직이기 어려우므로, 상상만으로 로봇 팔의 방향을 지시할 수 있는 인터페이스가 절실히 요구된다.
연구팀은 사용자의 자연스러운 팔 동작 상상을 공간해상도가 우수한 대뇌 피질 신호(electrocorticogram)로 측정하고, 변분 베이지안 최소제곱(variational Bayesian least square) 기계학습 기법을 활용해 직접 측정이 어려운 팔 동작의 방향 정보를 계산할 수 있는 디코딩 기술을 처음으로 개발했다.
또한 대뇌 피질 신호 디코딩을 통해 환자가 상상한 팔 뻗기 방향을 최대 80% 이상의 정확도로 예측할 수 있음을 확인했다.
연구팀이 개발한 팔 동작 방향 상상 뇌 신호 분석기술은 향후 사지마비 환자를 비롯한 운동장애를 겪는 환자를 대상으로 로봇 팔을 제어할 수 있는 뇌-기계 인터페이스 정확도 향상, 효율성 개선 등에 이바지할 수 있을 것으로 기대된다.
서울의대 신경외과 정천기 교수 연구팀이 참여하고 KAIST 바이오및뇌공학과 장상진 박사과정이 제1 저자로 참여한 이번 연구는 뇌공학 분야의 세계적인 국제 학술지 `저널 오브 뉴럴 엔지니어링' 9월 19권 5호에 출판됐다.
[저작권자ⓒ 대학저널. 무단전재-재배포 금지]